Posted inConference Papers News Publication
通过柔性指的本体感知来增强物品位姿估计|Enhancing Object Pose Estimation with a Soft Proprioceptive Finger
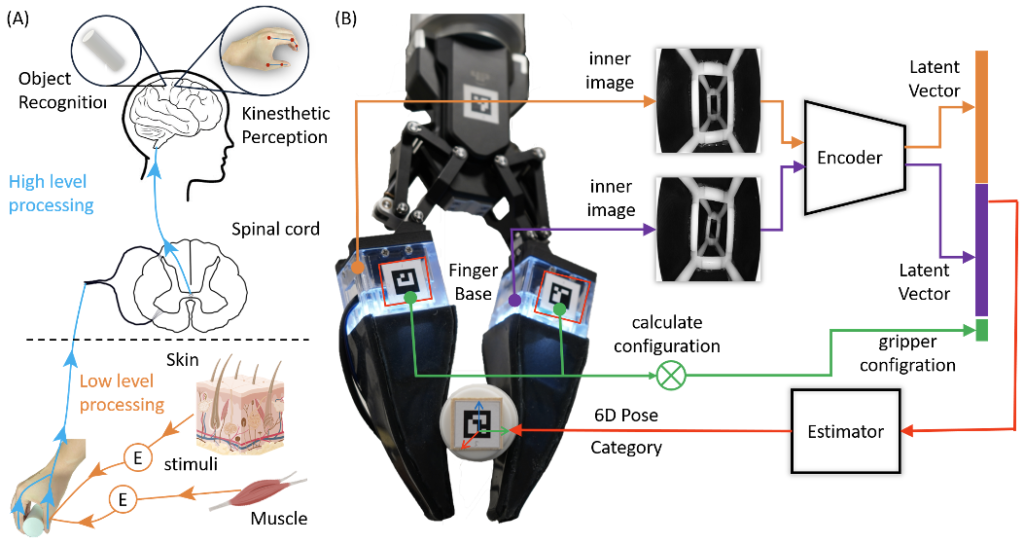
我们最近在《Biomimetics》期刊上发表的论文,提出了一种受人体触觉启发的软手指,结合内部视觉与动觉感知,用于估计手持物体的姿态,解决了机器人领域中充满挑战的问题,实现了高精度的姿态估计和物体分类。该论文第一作者刘小博是南方科技大学机械与能源工程系博士研究生,合作作者包括南方科技大学机械与能源工程系博士研究生韩旭东、郭宁,本文的共同通讯作者是设计学院助理教授万芳、机械与能源工程系助理教授宋超阳。
-C-CASE-HeadThroat-1024x576.jpg)
