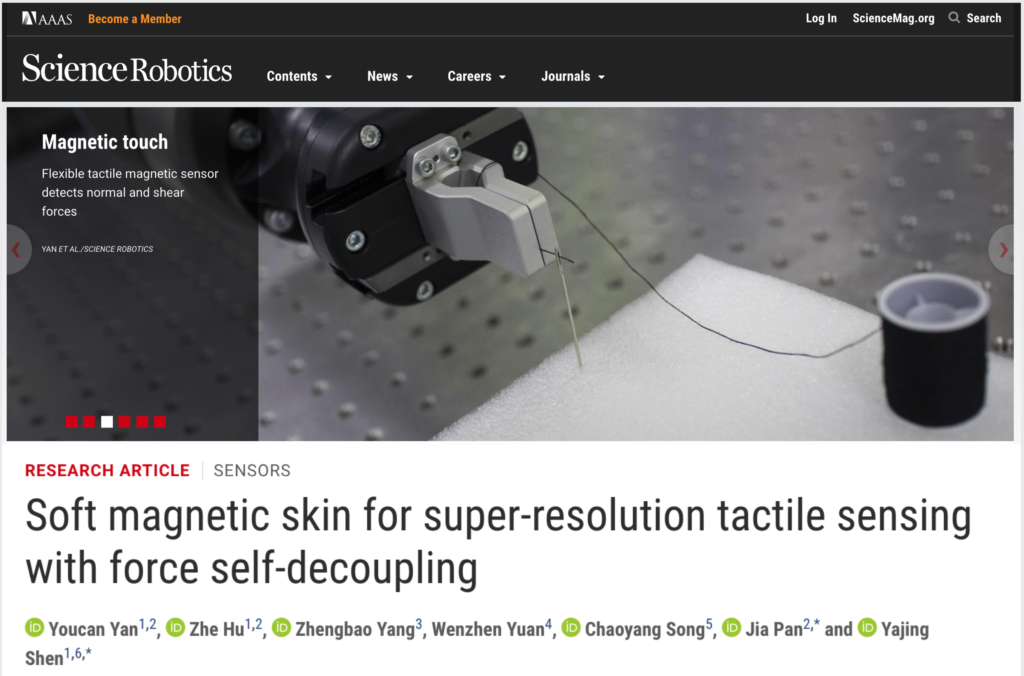
2021年2月24日,南方科技大学机械与能源工程系助理教授宋超阳团队,联合香港大学计算机科学系助理教授潘佳与香港城市大学生物医学工程系助理教授申亚京课题组,提出了一种基于磁性薄膜的触觉传感器,结合深度学习算法,实现了机器人触觉传感器的自解耦和超分辨率,为仿人类皮肤的触觉感知提供了新的思路。研究成果以“Soft magnetic skin for super-resolution tactile sensing with forceself-decoupling(自解耦的超分辨率柔性磁感皮肤)”为题,发表在《Science Robotics》(科学:机器人学)杂志上。