Posted inAward News Publication
荣获CASE2023最佳康复自动化论文奖及IEEE RAS差旅奖|CASE2023 Best Healthcare Automation Paper Award & IEEE RAS Travel Grant
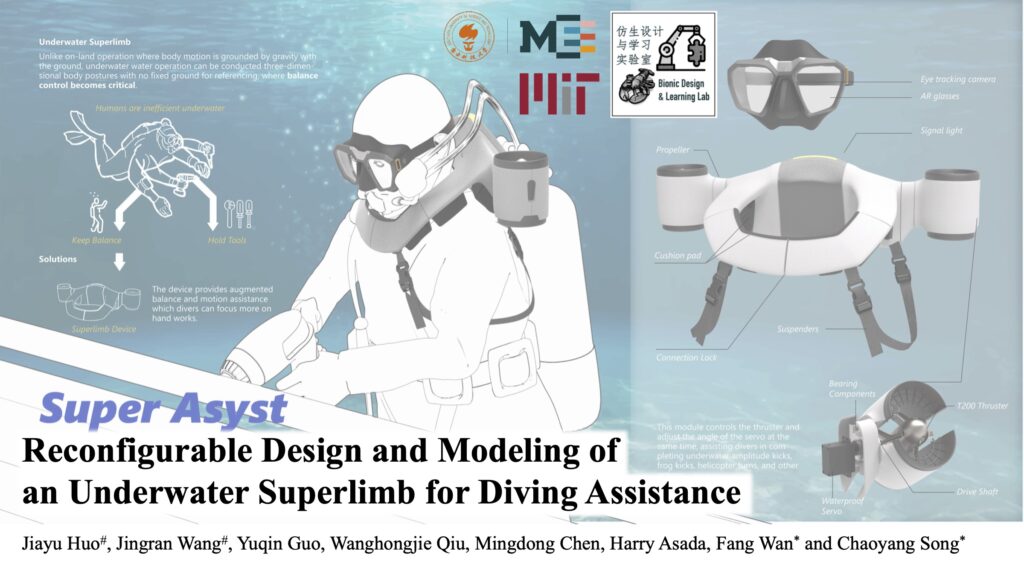
我们最近发表的水下人机交互技术论文,由该论文共同第一作者张镕正(南方科技大学设计学院硕士研究生)与邱望宏杰(南方科技大学机械与能源工程系本科生)前往新西兰会场进行现场汇报,经过评委评选,荣获CASE2023最佳康复自动化论文奖;张镕正同时荣获IEEE RAS差旅奖励,指导老师为设计学院助理教授万芳。