Posted inNews
祝贺:南科大仿生与设计学习实验室本科生江海洋在RoboSoft会议上成功发文
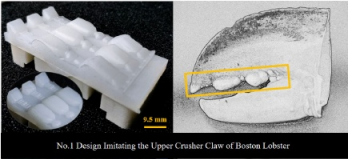
近日,南方科技大学仿生与设计学习实验室本科生江海洋以第一作者的身份参加了2021 robosoft 国际会议并在IEEE Xplorr网站上发表了一篇会议文章《Lobster-inspired Finger Surface Design for Grasping with Enhanced Robustness》,本文提出了一种受龙虾启发的用于抓取的软手指接触面增强鲁棒性的设计。实验结果表明,与裸手指表面相比,接触面层在某些情况下对抓取成功率最多提高56%的性能有显著的好处。
![[BionicDL] Undergraduate Final Year Project](https://ancorasir.com/wp-content/uploads/2020/09/Research-1024x929.png)