经过历时一年的重组与整备,原南科大「机器智能社」顺利完成更名、成为南科大「机器人社」,全体同学积极备赛,于2024年6月28日完成全体成员行前会议,翌日清晨,社团成员整队出发,积极备战将下周将于南京理工大学举办的RoboCon2024赛事。祝愿各位同学细致备赛、不负韶华、为青春流汗、用技术展现风采,预祝各位同学取得好成绩,也祝全国参赛队伍顺利参赛、精彩竞赛!
Design and Learning Research Group
南科大「机器人社」是南方科技大学三星社团,致力于成为南科大同学与国内外高水平机器人赛事连接的桥梁与纽带,主要面向南科大各年级、各专业的本科生,也非常欢迎研究生同学的踊跃参与,组成队伍锻炼自我、磨合团队、学习成长、找到快乐~





关于「机器人社」
社团现任社长机器人工程21级本科生黄国靖,副社长机器人工程专业22级本科生潘炜,社团成员40余人。社团创始社长韩旭东,社团指导老师宋超阳,助理指导老师何珊珊,由「南方科技大学机械与能源工程系」提供核心赞助,由「南科大机器智能设计与学习虚拟教研室」提供技术指导,非常荣幸获得金牌赞助商「资福医疗技术」、高级赞助商「地平线机器人」的资助,特别感谢来自「树德书院」的场地与行政支持。



赛事简介
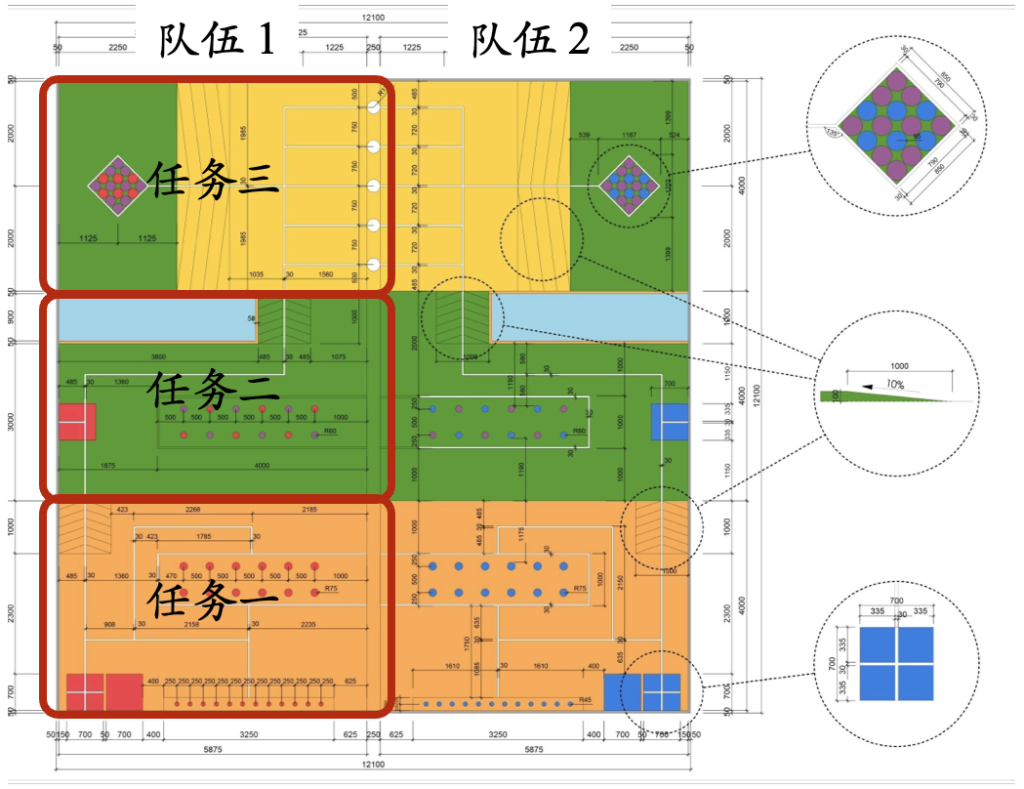
ROBOCON赛事是亚洲-太平洋广播联盟(ABU)发起的一项国际性大学生机器人赛事。中国于2002年开始举办全国大学生机器人大赛ROBOCON,选拔冠军队代表中国参加亚太大学生机器人大赛(ABU ROBOCON)。目前它已成为国内技术挑战性最强、影响力最大的大学生机器人赛事。赛事每年推出一个新的主题,由主办国根据本国的历史文化特点制定比赛的内容和规则,参赛者综合运用机械、电子、控制等技术和工具,经过约十个月制作和准备,制作机器人完成规则设置的任务。
竞赛准备
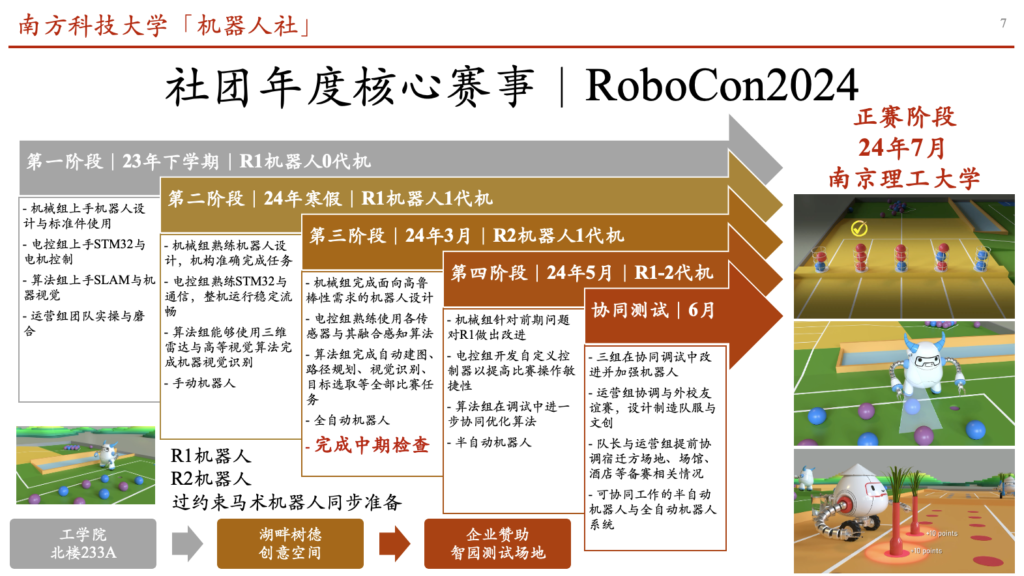
本次赛事,南科大机器人社针对两个赛项分别派出一套机器人方案参加比赛。在启动正式备赛前,社团资深成员已经在校内开展多项小规模的成员培训、赛事宣传、赞助洽谈。进入正式备赛阶段后,对赛事进行了多方面的整体规划以及分组成员的培训与机器人研制开发。

备赛现场
抵达备赛现场后,「机器人社」同学也在积极备赛,分享一些同学们的现场照片,欢迎感兴趣的朋友亲临现场支持鼓励~~赛后会发布更多机器人真机照片等现场环节~~祝各位同学赛出实力,比出好成绩~~加油!!!























机器人队员
本次竞赛,「南科智能」队携带了4台机器人,其中「颗粒归仓」赛项,派出一台R1手动机器人、一台R2自动机器人;「仿生足式」赛项,派出一台过约束足式手动机器人;此外,同学们也带了一台R2手动机器人在备战区默默观摩。

本次参赛的R1机器人,队员们采用了专门为秧苗尺寸定制的环形末端,两对夹爪可一次操作夹取四颗秧苗,逐对释放时,配有激光射线辅助操作员快速对准;在取球方面,采用橡皮筋滚轮实现自适应取球,无需纠结由于球尺寸可能的制造误差带来的不确定性,大大提升了机器人取球的适应性与可靠性,同时借助二区三区之间的斜坡,采用较为特别且稳妥的方式将球慢速滚入三区,最大程度上减小对R2机器人的干扰。
本次参赛的R2机器人,队员们则采取相对激进的L型底盘设计,期望通过安装的激光雷达实现自主定位与导航,在L型夹角处安装了一个吸盘式滑轨臂,配合机器视觉实现识别与定位。不过略显遗憾的是由于该方案较为特殊,整机的稳定性调试周期较长,实际测试中,测试场地灯光的明暗差别较为显著、地板环境与赛场环境不同,也给R2机器人的实际表现带来的诸多挑战。

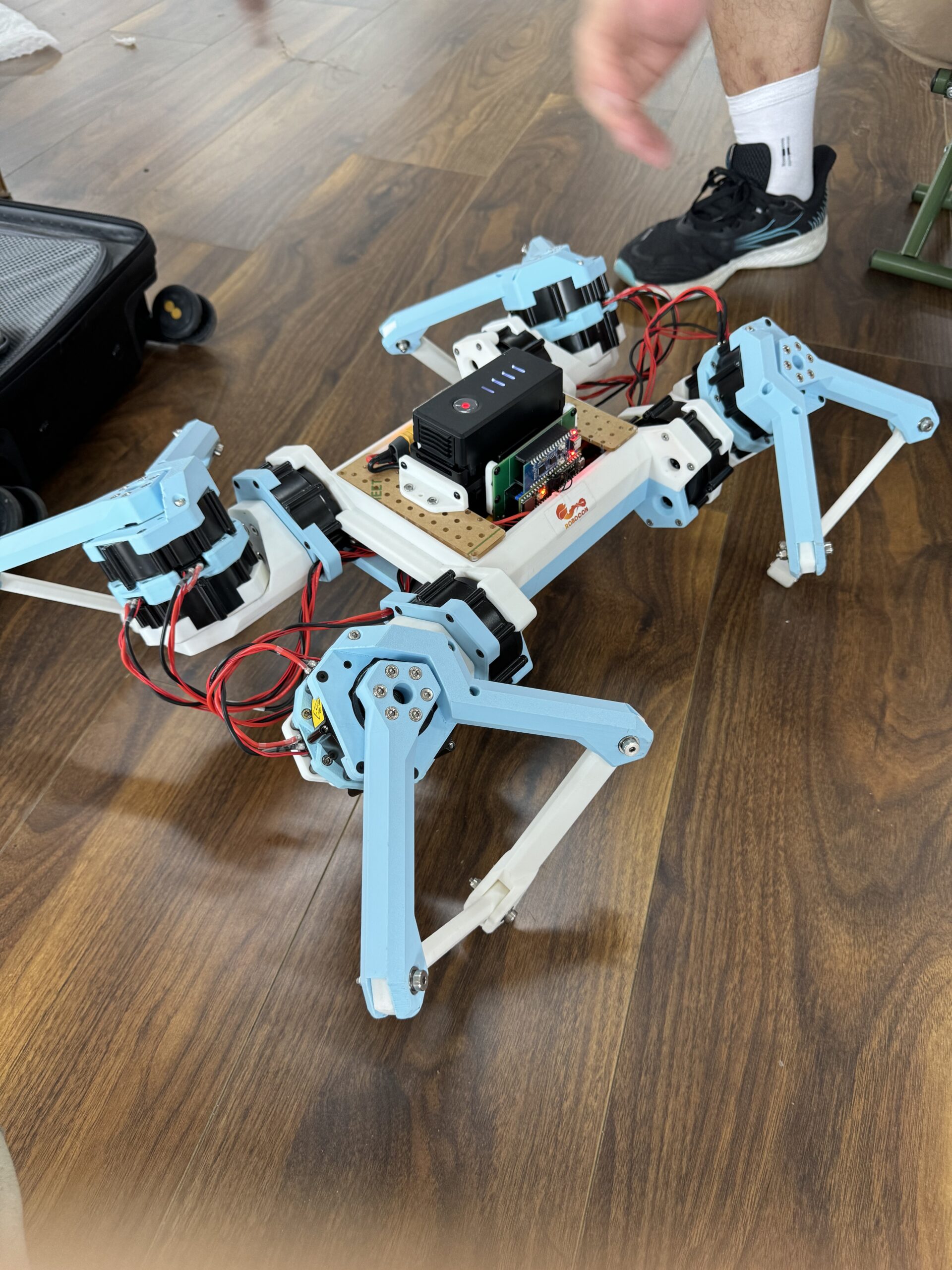
本次参赛的仿生足式机器人,由许戎汉同学主力设计,与黄国靖同学通力合作,选取了一个较为激进的整机设计方案,采用了设计与学习实验室发明并研制的过约束机器人肢体,我们还在等着把论文出来,同学们就直接拿去参加机器人竞赛了~~~借助其独特的过约束类爬行生物肢体造型与空间运动方式,吸引了不少同学们的讨论与交流~~~同时全身直接采用由拓竹3D打印机加工的零部件,也是其一大特色~~~从前期测试的表现看来,用我们同学的话:“迈出的步伐那叫一个「六亲不认」”~气场很足~~~期待后期搭配上我们最近开发的深度强化学习算法,能走的更加自然、自主、智能~~~感兴趣的话,欢迎搜索我们的文章,我们近期也会将这一系列的机器人设计完整开源出来~~欢迎交流~~~
赛场实况
「颗粒归仓」赛项,R1机器人表现稳健,每次出场都出色稳定且快速高效的完成了技术动作并获得满分,R2机器人虽然状况不断,但同学们还是夜以继日的积极调试,我们也结合赛事进展与机器人的实际情况,制定了相应的竞赛策略。这次竞技,同学们技术与战术相结合,比出了特色与风采,也付出了汗水与汗水(南京好热)~~~

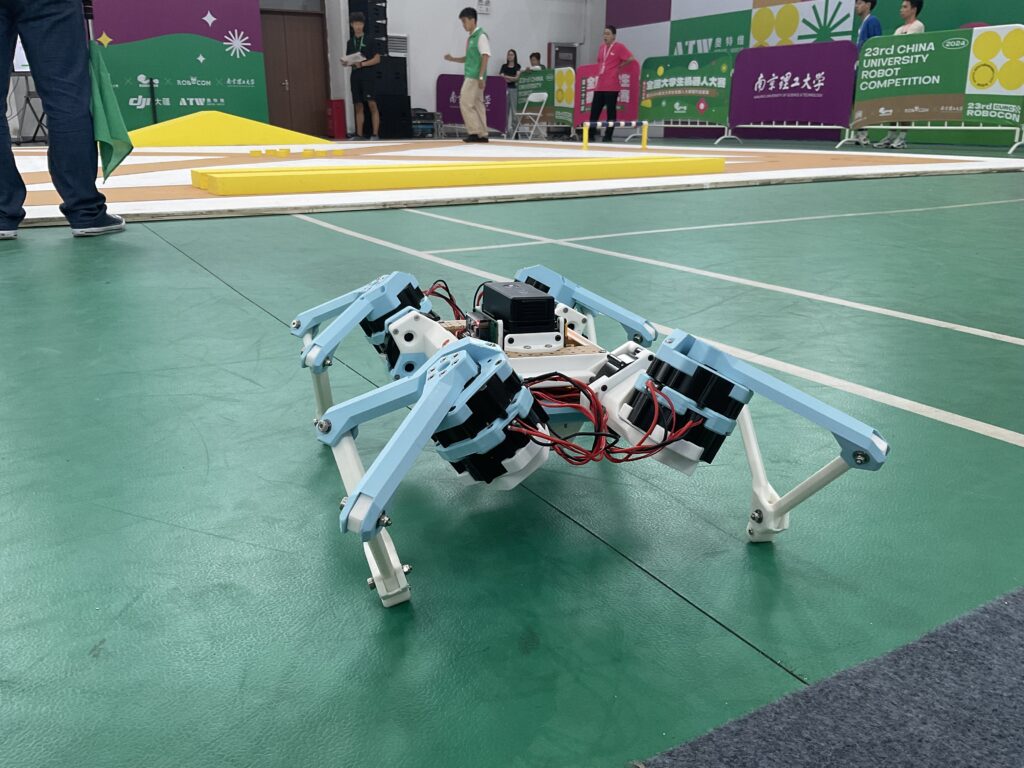
「仿生足式」赛项,过约束足式借助其独特的设计、呆萌的造型,无疑已经成为了赛场上最特别的那一抹「蓝白相间」~~许同学最终决定的这个方案其实极为激进,毕竟我们科研团队也仅是于近期、才刚刚研制出这款设计独特的过约束机器人足式肢体。过约束机构在机器人肢体上的首次实操就直接上了竞技赛场~~而且整机采用极为激进的全3D打印加工方案,放眼赛场上百余支战队,都极为罕见~~同时也要感谢拓竹打印机稳健的加工能力~~

竞赛成绩
「颗粒归仓」赛项,「南科智能」战队顺利进入第二轮全国总决赛32强名单,分在F组,同组其他高校包括西南科技大学、北方工业大学、西南交通大学。小组循环赛中,R1机器人小有失误但表现稳健,队员连夜抢修R2机器人,但受限于相对较少的参赛经验,R2机器人遗憾未能实现自动上三区得分,止步小组循环赛阶段。参考往届竞赛评比规则,预期将获得国家级二等奖,追平战队上次参赛的最好成绩





「仿生足式」赛项,「南科智能」战队首次采用了全场也是全球唯一的过约束空间构型肢体设计参赛。在「竞速赛」和「越野赛」的预选赛分别完成得分动作,预计将分别荣获国家级三等奖,相比往届参赛未能上场完成技术动作已实现突破。作为全场唯一使用空间过约束机构设计腿部构型的团队,对团队参加本次竞赛提出了诸多挑战,比如未能使用目前仍在研发阶段的深度强化学习自主行走步态算法等。机器人全身尺寸也相对较小,全身结构采用3D打印加工,整体方案较为激进。即便如此,该机器人仍顺利登场参与竞技,特别在竞速赛环节获得所有得分并实现零失分。作为全场步态最「六亲不认」的仿生足式机器人,首次登场能有此表现,仍要向参赛队员表示祝贺。



「单项技能」赛项,「南科智能」战队派出本次竞赛发挥稳定的R1机器人登场。「操作技能挑战赛」中,黄光毅同学稳定发挥并完成140分得分,预计将荣获国家级一等奖;在「全能奖」的竞技中,预计将荣获国家级二等奖。






队员风采





















重整旗鼓,明年有约
「南科智能」战队顺利完成本届RoboCon2024赛事,参考奖项设置规则,预计将荣获国家级一等奖1项、国家级二等奖2项、国家级三等奖2项。在「颗粒归仓」赛项:「正赛」进入总决赛32强,预计将获得国家级二等奖,追平往届最好成绩;「操作技能挑战赛」中,黄光毅同学稳定发挥并完成140分得分,预计将荣获国家级一等奖;在「全能奖」的竞技中,预计将荣获国家级二等奖。在「仿生足式挑战赛」赛项:首次采用了全场也是全球唯一的过约束空间构型肢体设计参赛,在「竞速赛」和「越野赛」的预选赛分别完成得分动作,预计将分别荣获国家级三等奖,相比往届参赛未能上场完成技术动作已实现突破。

再次祝贺各位参赛同学的激情参赛与辛勤汗水~~~也非常高兴看到全国各高校战队的精彩表现~~~RoboCon2025再会~~~

